Trainability of Badger – Why is Badger so hard to train?
To understand why Badger is hard to train, we need to understand first how Badger learns, using a toy task. We try to understand the plateaus, what happens during this period, and why the plateaus are there.
Read more
GoodAI’s ToyArchitecture published in PLOS ONE
Research in Artificial Intelligence (AI) has focused mostly on two extremes: either on small improvements in narrow AI domains, or on universal theoretical frameworks which are often uncomputable, or lack practical implementations.
Read more
Internal Badger Workshop – Summary
We recently organized an internal workshop with a number of external collaborators to advance the progress of various challenging topics related to the Badger architecture. In this post, we would like to share the outcomes of sessions.
Read more
5 ways COVID-19 is changing the future
The emergence and global spread of COVID-19 has already changed the world in ways that were unimaginable at the start of the year. However, in many areas, it seems to have sped up changes that were on the horizon anyway.
Read more
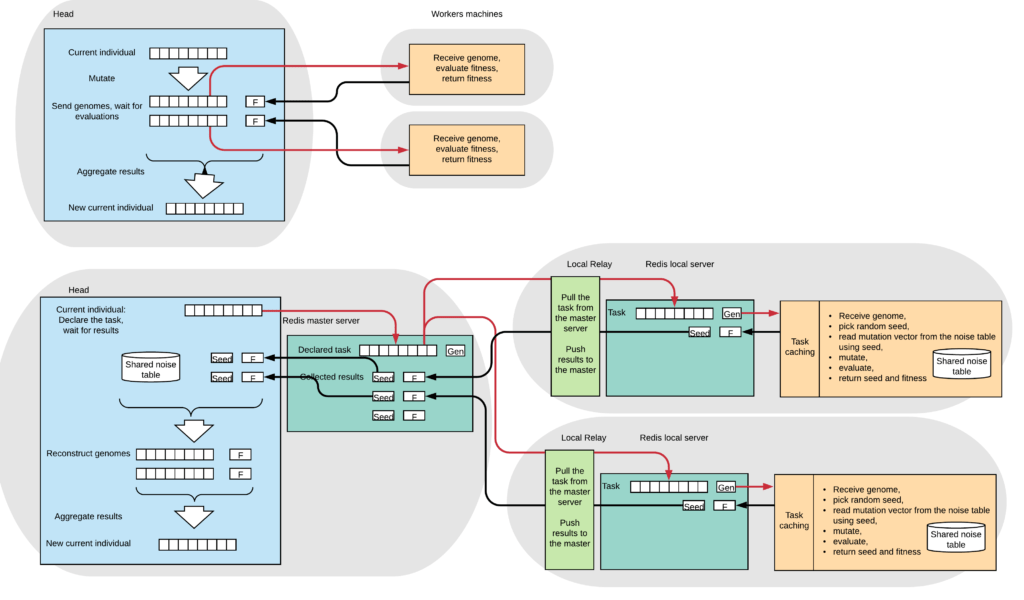
Distributed Evolutionary Computation on Deep Reinforcement Learning Tasks
Currently, we are experimenting with an experimental setup proposed in our Badger paper. One of the areas of explorations is an evaluation of suitability of various training settings: supervised learning, Deep Reinforcement Learning (RL), and evolutionary optimization.
Read more
9 ways AGI could shape the world for the better
The idea of general AI has long captured the imagination of people across the world. But what would society and the economy look like in a world with general AI?
Read more
Neural Networks in Unity using Native Libraries
This guide shows how to use Pytorch’s C++ API to use neural networks in Unity. We can use this with existing Python-based models, by freezing the execution trace into a binary file that is loaded by the library at runtime.
Read more
Implementation of Generative Teaching Networks for PyTorch
At GoodAI, we’re interested in multi-agent architectures that can learn to rapidly adapt to new and unseen environments we expect the behavior and adaptation to be learned through communication of homogeneous units inside a single agent, allowing for better generalization.
Read more